

自動制御の方式のひとつです。電気炉等の温度のコントロールに多く用いられています。
温度制御の性能は次のような項目で判断できます。
このようなことを、実現するのが制御の目的です。
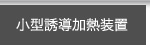
最もシンプルな制御方式です。目標温度到達まではフル通電して加熱し、目標温度に到達すると通電をオフします。
複雑な演算は必要ないため、電気こたつのようにバイメタルによる制御も可能です。
反面制御対象によっては、目標温度からの行き過ぎ(オーバーシュート)が起こったり、周期的な変動(ハンチング)が大きくなってしまいます。
目標温度と現在温度との偏差に比例して出力を調整する制御方式です。
比例(Proportional)の頭文字をとってP制御と呼びます。
どの程度の温度差の時に、何パーセント出力するかの設定値を、比例ゲインKpと呼びます。
例えば、温度差20℃で、出力100%となるように比例ゲインを設定した場合、目標温度が1000℃で、現在温度が990℃なら100%出力、現在温度が1000℃で50%出力、現在温度が1010℃で0%出力という具合です。
制御機器によっては、比例ゲインKpではなく、出力が0~100%まで変化する温度帯の幅(上の例では20℃)を比例帯と呼び、これを入力するものもあります。
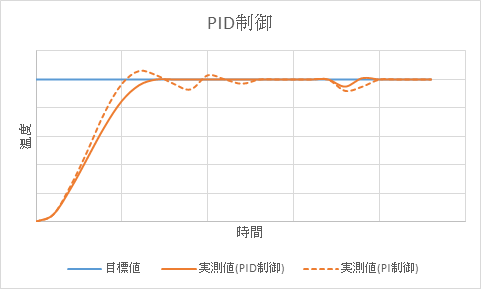
P制御は、ON-OFF制御に比べて、行き過ぎ(オーバーシュート)や周期的な変動(ハンチング)を押さえることができます。
但し原理的に、安定状態に到達後、目標温度との偏差(オフセット)が生じます。
比例ゲインを極端に大きく(比例帯を狭く)すると、殆どON-OFF制御と同様の動作となります。
逆に比例ゲインを小さく(比例帯を広く)すると、目標温度から離れた温度から比例制御が効き始めるため、なかなか目標温度に近づきません。
また、温度偏差(オフセット)も大きくなります。

P制御の欠点である温度偏差(オフセット)を解消するのが、積分制御で、積分(Integral)の頭文字をとってI制御と呼びます。
実際はI制御単独で使用されることはなく、P制御と組み合わせたPI制御として使用されます。
I制御は、目標温度との偏差の時間積分に比例して、出力を加減します。
温度偏差(オフセット)があると、それが積算されて出力に加わっていくため、徐々に解消する方向になります。
I制御の強さ表す数値を積分ゲインKiと呼びます。
多くの制御機器では、積分ゲインKiと比例ゲインKpの比率、言い換えると「どの程度の時間で積分制御と比例制御が同等の出力になるか」を示す数値を入力します。この数値を積分時間Tiと呼びます(Ki=Kp/Ti)。
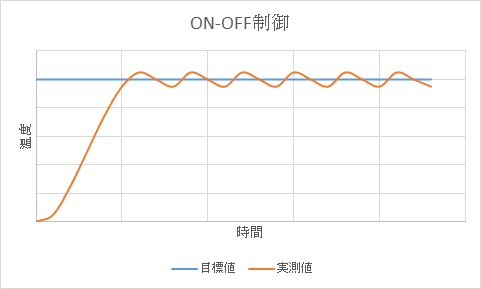
積分時間Tiは小さい程強く作用し、温度偏差(オフセット)は早く解消しますが、反面行き過ぎ(オーバーシュート)が大きくなる傾向となります。
逆に積分時間Tiを大きくすると、目標温度への到達は遅くなりますが、行き過ぎ(オーバーシュート)は小さくなります。
外乱などによる急激な温度変化に対応して、出力を変更するのが微分制御で、微分(Differential)の頭文字をとってD制御と呼びます。
D制御もI制御同様、単独で使用されることはなく、P制御、I制御と組み合わせて使用されます。
D制御は温度の変化速度に比例して出力を加減します。
外乱などで、温度が急激に変化すると、即座にその変化を打ち消すように出力を変更します。
D制御の強さ表す数値を微分ゲインKdと呼びます。
多くの制御機器では、微分ゲインKdと比例ゲインKpの比率、言い換えると「どの程度の時間、温度変化が継続するとP制御と同等の出力になるか」を示す数値を入力します。この数値を微分時間Tdと呼びます(Kd=Kp×Td)。
微分時間Tdは大きい程強く作用し、外乱等による温度変動を素早く解消できます。
また、目標温度への昇温の際も、急激な温度変化を妨げる方向に作用するため、到達時間が長く掛かってしまう反面、行き過ぎ(オーバーシュート)を抑える効果があります。
D制御は、温度の短時間の変化に反応するため、温度センサーに加わった小さな電気的なノイズに反応して出力が変動することがあり、その点注意が必要です。